لطالما كان عالم الروبوتات مجالا مفتوحا للابتكار والتطوير. لكنه في ذات الوقت كان يأخذ من أي عالم أو مبتكر آلاف الساعات في تصميم الأكواد البرمجية. ففي عالم الروبوتات التقليدي، تغيير تصميم ذراع آلية بمقدار سنتيمترات قليلة يعني أن تُمحى آلاف الساعات من العمل البرمجي. وهذه المشكلة تعرف بـ”الارتباط المورفولوجي”، والتي ظلت لعقود هي العائق الأكبر أمام انتشار الروبوتات المرنة.
لكن اليوم، استطاع باحثون من المعهد الفيدرالي السويسري للتكنولوجيا في لوزان “إي بي إف إل” (EPFL) تحويل هذه القيود إلي إطار عمل ثوري يمنح الآلات ما وصفوه بـ”الذكاء الحركي”.
فقد كشف باحثون من مختبر “كرييت” في المعهد عن الابتكار الجديد، الذي نشرت تفاصيله في دورية ساينس روبوتيكس، والذي بدوره يحل واحدة من أعقد معضلات الروبوتات، وهي كيف يمكن تعليم مهارة واحدة لروبوتات مختلفة البنية دون الحاجة لكتابة كود برمجي جديد من الصفر؟
لطالما عانى قطاع الروبوتات من مشكلة “الهشاشة البرمجية”. فالحركة التي يتعلمها روبوت ما تعتمد كليا على ترتيب مفاصله وحدود حركته ومتطلبات اتزانه. وهذا الارتباط يجعل تحديث أسطول الروبوتات في المصانع عملية مكلفة ومعقدة. فلا تقتصر على استبدال العتاد بل تمتد لإعادة تعريف المهام وضبط حدود الأمان لكل آلة جديدة.
لكن الباحثين يقولون في دراستهم إن الحل يكمن في فصل فكرة المهارة عن خصائص الروبوت الفردي. وبدلا من نسخ المسار الحركي بدقة، يقوم النظام بتحويل المهمة التي يعرضها الإنسان إلى إستراتيجية حركة عامة يمكن لأي روبوت تفسيرها وفقا لحدوده الميكانيكية الخاصة.
اعتمد الفريق البحثي الذي تقوده البروفيسورة أود بيلار منهجية ثلاثية الأبعاد لبناء هذا الإطار:
1- التسجيل والتحليل: استخدم الباحثون تقنيات التقاط الحركة لتسجيل مهام بشرية مثل وضع الأشياء ودفعها ورميها.
2- التجريد الرياضي: تم تحويل هذه الحركات إلى إستراتيجيات رياضية عامة لا ترتبط بهيكل روبوت معين.
3- التكييف الميكانيكي: وضع الفريق تصنيفا للمحيط الفيزيائي لكل روبوت، من مدى المفاصل ونقاط الاستقرار. وهنا، لا يقوم الروبوت بالتقليد الأعمى، بل يكيف المهارة مهما كانت لتناسب تصميم جسده.
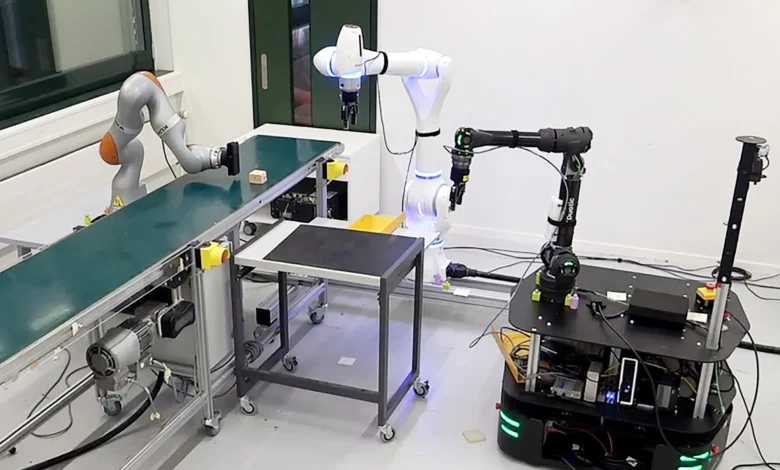
وبناء على التجربة التي تمت باختبار عملي، تمكنت ثلاثة روبوتات تجارية مختلفة تماما من تنفيذ تسلسل معقد وهي دفع كتلة خشبية ووضعها على طاولة ثم رميها بأمان تام. بل وظل النظام يعمل بكفاءة حتى عند تغيير توزيع الخطوات بين الروبوتات.
وتؤكد البروفيسورة أود بيلار أن القيمة الحقيقية لهذا النظام تكمن في “السلوك المتوقع”. فبينما تنجح أنظمة التعلم الروبوتية الأخرى في المختبر، غالبا ما تفشل عند نقلها للواقع. أما إطار “الذكاء الحركي” فيضمن أن ينفذ كل روبوت المهمة ضمن “حدوده الآمنة”، مما يقلل المخاطر في بيئات التشغيل فعليا.
وهذا الأمر سيترك أثره الأكبر على قطاع التصنيع، بحيث تقل التكلفة والزمن. فاستبدال الروبوتات أو تحديثها لن يتطلب فترات تعطيل طويلة لإعادة البرمجة. إضافة لديمقراطية الأتمتة، فتقليل الحاجة لفرق برمجة متخصصة لكل منصة يسهل على الشركات الصغيرة تبني الروبوتات.
كما أن هذا الأمر سيؤدي لاستدامة العتاد. حيث مع تطور العتاد المتسارع، تضمن هذه التقنية انتقال المهارات بسلاسة من جيل إلى جيل.
وبحسب الباحثين العاملين على الدراسة، فإن طموحهم لا يتوقف عند المصانع، بل يرون في هذا الإطار حجر زاوية لمستقبل التفاعل بين الإنسان والروبوت عبر اللغة الطبيعية. ففي المستقبل، قد يكفي أن تعطي أمرا بسيطا للروبوت، ليتولى “ذكاؤه الحركي” ترجمة هذا الأمر إلى حركة فيزيائية تناسب طول ذراعه وقوة محركاته.
ويضيف الباحثون أن العالم اليوم ينتقل من عصر “برمجة الآلات” إلى عصر “تلقين المهارات”، حيث تصبح المهارة ملكية فكرية قابلة للنقل والنمو، تماما كما تنتقل الخبرة بين البشر. وهذا الأمر من شأنه أن يساهم في تبسيط العمل وديمومته، وأن لا تُمحى الجهود بمجرد التطور، وإنما يُبنى عليها.
فالروبوت الذي يعمل كآلة كاتبة تنفذ أوامر محددة، هو أقرب الآن إلى “المتدرب البشري” الذي يراقب ويقلد ثم يطور مهارته مع التكرار. وهذا يفتح الباب لاستخدام الروبوتات في بيئات غير منظمة مثل المنازل والمستشفيات، وليس فقط في خطوط الإنتاج المغلقة.